Advanced quantum PNT provides a dependable backup to GPS. Discover the different quantum approaches solving mission-critical navigation challenges.
M. J. Biercuk, A. Canciani, R. Anderson, M. R. Hush
Advanced positioning, navigation, and timing (PNT) technologies occupy a primary focus in defense and civilian circles due to a massive increase in attacks on GPS, our ubiquitous navigation solution. The wars in Ukraine and Iran and a dramatic uptick in jamming and spoofing of commercial airliners and ships over the last two years highlight the vulnerabilities of GPS in stark relief.
This context, plus the rapid development of quantum technologies, has focused interest in the application of quantum sensing for PNT. This interest achieved real-world impact last year with Q-CTRL’s world-first demonstration that a commercial quantum PNT system could outperform the best conventional GPS backup in the field.
This effort marked a technical landmark in the industry, representing the first time since the development of atomic clocks that a quantum technology could give a decisive advantage over its classical counterparts. Clearly, it’s not the only effort, with various competing and complementary quantum PNT solutions currently under development.
This short overview is designed to help you navigate this complex landscape, providing an overview of the various quantum approaches to PNT.
Quantum timing and synchronization
Atomic clocks are one of the first true quantum technologies, going back decades. They access the very stable “tick” inside of atoms using quantum techniques and provide tremendously stable timing references. Across a variety of applications, atomic clocks are an essential tool as they enable the wide-area network synchronization critical to the information age.
One of the most common ways to distribute synchronized timing information is GPS. The satellites themselves contain atomic clocks used in both positioning and in timing distributions. That means a GPS outage has impacts far beyond the ability of a ship or airplane to navigate.
Accordingly, there is a push to expand the utility and deployability of quantum clocks. Going back over a decade, a consortium led by DARPA investment developed the first chip-scale atomic clock (CSAC), prioritizing very small form factors. Today, efforts continue to deliver even greater performance in rack-scale instruments.
The rule of thumb in timekeeping is that your timing precision increases as the rate of your tick increases. This concept is fairly straightforward—imagine trying to precisely time the finish of an Olympic swimming race where the swimmers may only be separated by a few hundredths of a second. Now try doing that with a standard one-second quartz watch.
The next generation of quantum atomic clocks takes the tick frequency from the microwave (Gigahertz) to the optical (hundreds of Terahertz). The higher tick rate can give improved fractional uncertainty or precision. And current efforts from a variety of organizations, such as Quant-X Labs and Vector Atomic, have ruggedized these systems enough to perform well outside of lab environments, including on moving vehicles. This is an area where quantum approaches to timing have long dominated the field, and the next generation of quantum clocks will likely lead as well.
Quantum positioning and navigation
The “P” and “N” in PNT attract much more attention in the quantum sector because the potential value is so high and the need is so clear, with the global navigation market anticipated to hit over $440B by 2031.
Quantum navigation solutions broadly leverage quantum sensors—detectors of the ambient environment where signal transduction leverages a quantum effect—to passively detect signals useful in navigation, including inertial accelerations and geophysical fields. They fundamentally leverage the fact that quantum sensors provide both enhanced sensitivity (the ability to detect a signal of a certain size in a fixed amount of time) and enhanced stability (the constancy of the signal output over time). A bonus is that many quantum sensor measurements are absolute in that they do not require any calibration against external references—the laws of quantum physics provide the reference against fundamental constants!
As a result, quantum navigation technologies have the advantages of being unjammable, unspoofable, and undetectable since they do not rely on any broadcast radio frequency signals. This makes them exceptionally appealing for both commercial and defense operations, opening new mission profiles that have previously been inaccessible.
Beyond Q-CTRL’s quantum advantage demonstration, quantum positioning and navigation remains an area dominated by promising R&D across a range of competing and complementary approaches. Here we’ll give a brief overview emphasizing the unique advantages and challenges of each.
Inertial measurement
One of the most common GPS backups is an inertial measurement unit (IMU). An IMU uses mechanical and optical accelerometers and gyroscopes to measure how a vehicle is moving. With these measurements and a known starting position, it’s possible to use Newton’s laws to calculate a navigation solution.
Inertial measurements and the associated inertial navigation solutions face a critical challenge—susceptibility to unbounded error growth. In particular, the inertial measurement units themselves tend to suffer from drifts which are slow changes due to variations in temperature, atmospheric pressure, or just instrument aging.
Drift errors accumulate over time and often in complex and nonlinear ways, making them difficult to compensate for. Accordingly, we often describe the performance of a navigation solution as the positioning error after a period of GPS-free navigation. For instance, one nautical mile of positioning error after one hour of navigation is a common performance level for aviation-grade inertial navigation systems.
Quantum sensors provide a potential edge here. Atomic devices based on a measurement technique known as atom interferometry are capable of providing absolute measurements of acceleration with dramatically reduced drift rates; this works for both linear acceleration and gyroscopic measurements of rotation. Atom interferometry uses the wave-like nature of matter (like light) and the fact that atoms have mass (unlike light) to perform very sensitive and stable measurements of acceleration. It’s worth noting that quantum inertial devices do not eliminate drift; they only suppress the rate of drift (targeting drift rates well below currently deployed systems).
In the last several years, we’ve seen aggressive translation of laboratory capabilities into real-world field trials and efforts focused on miniaturization and ruggedization. For instance, we are working with Lockheed Martin and AOSense via the U.S. Defense Innovation Unit to produce a new generation of quantum inertial measurement units. And there have been a wide range of quantum accelerometer trials in the real world, including both maritime and ground-based deployments of linear accelerometers by Q-CTRL, maritime trials by ONERA, and various academic instruments deployed on moving vessels.
Progress has been excellent, but so has the classical competition. Quantum inertial has yet to demonstrate performance in real-world environments that competes with currently deployed systems. Nonetheless, the laboratory baseline demonstrations and potential to combine sensitivity with stability in real-world settings through hardware and software ruggedization provide an exceptional opportunity for ongoing development of ultra-low-drift quantum IMUs.
Geophysical map matching
2025 was the year that quantum advantage was decidedly achieved in navigation, and geomagnetic positioning was the approach used to deliver this important milestone.
Most people are familiar with magnetic navigation based on compasses, which give heading (direction) information. These measure the orientation of the magnetic field coming from Earth’s core.
There’s more information in Earth’s geophysical field, that’s now exploitable using quantum sensors. For instance, Earth’s crust contains small variations in magnetic susceptibility due to differences in its mineral composition, which perturb the Earth’s core magnetic field. These are not detectable by compasses, but can be detected with sufficiently sensitive magnetometers (for their magnetic signatures) or gravimeters (for their gravitational signatures).
If you can “see” these tiny geophysical variations with a quantum sensor, you have a pathway to navigation using a technique called database-reference navigation (DBRN) or map matching. Over decades, minerals prospectors, geoscience organizations, and other government departments have built maps of these tiny magnetic and gravitational anomalies.
Quantum sensors provide a new set of eyes to detect these geophysical anomalies across a wide variety of platforms. They deliver both the sensitivity and stability required to position oneself on moving vehicles and at significant distances from the Earth’s surface (e.g. aircraft cruising altitude).
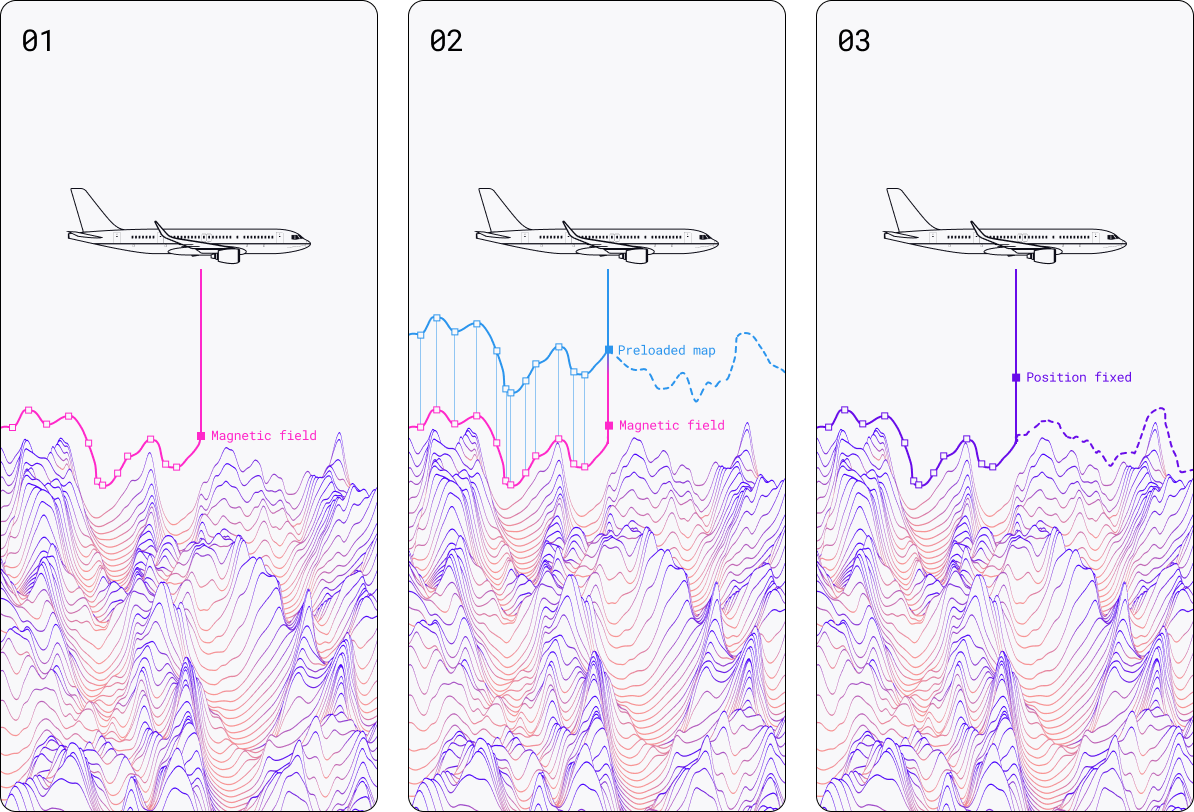
Positioning then requires a comparison of the local variations measured on a moving platform against the map, much the way visual navigation allows a pilot to compare what they see in fair weather against known landmarks. The process combines inputs from an IMU/INS with the quantum sensor in order to lock to a specific location estimate on the map.
This approach is quite distinct from general dead-reckoning navigation; because you frequently reassess your position relative to a map, errors do not accumulate over time (they’re “reset” each time you position yourself), and overall performance is not linked to the duration of travel in either time or distance. This delivers bounded positioning and is distinct from what’s achievable in any form of pure inertial navigation.
Earth’s crust carries a distinct magnetic fingerprint—tiny variations that differ from place to place. By comparing live magnetic readings to a detailed onboard map, an aircraft can determine its location anywhere on the planet, without GPS. The technique offers low-error positioning over long flights, relying only on nature's magnetic landmarks rather than external radio signals received from satellites vulnerable to disruption. Source: Q-CTRL
Magnetic vs gravitational navigation
Geophysical map matching requires a choice of sensing modality: gravity or magnetism. Which is most relevant depends primarily on the platform of choice; both gravitational and magnetic anomaly signatures exist all over the world with approximately equal accessibility for today’s quantum sensors.
Broadly, magnetic navigation systems are smaller and cheaper than their gravitational counterparts, making them compatible with a wide variety of small-form autonomous vehicles - Q-CTRL’s magnetic navigation system was deployed on a defense drone. They also work well at high speeds (the sensor “sees” more magnetic fluctuations), making airborne operation favorable. Gravitational sensors, by contrast, are currently considerably larger and work well at low speeds where significant averaging improves the precision of the local-gravity estimate. This, plus the deleterious electric currents carried in seawater mean gravitational navigation has real strengths in maritime settings.
The platform challenges encountered differ between magnetic and gravitational map matching as well.
In quantum magnetic navigation, one of the most significant challenges is disambiguating the geomagnetic reference signal from various sources of magnetic interference. For instance, a metal vehicle moving in Earth’s field induces currents that pollute the magnetometer’s signals and appear similar to geomagnetic landmarks. The process by which this and other sources of interference (for instance, space weather!) are removed is known as denoising. Recent approaches developed at Q-CTRL combine narrow application of “physics-constrained AI” in order to allow functionality without special calibration maneuvers and with resilience against operational changes such as the location of magnetic objects on the vehicle.
The problem set is quite different in gravitational navigation. Here, there are no erroneous gravitational signals to contend with, but there are platform accelerations and significant challenges in how you align the sensor to a true vertical. It’s essential to leverage co-sensors (quantum or classical) to compensate for high-frequency accelerations and to carefully calibrate device alignment against the true axis of gravity using inputs from IMUs, star cameras, or the like.
A final difference between magnetic and gravity navigation stems from the available reference databases. Gravity data over oceans can be measured from space using radar altimetry to map changes in sea-surface height, and sea-surface height can be mathematically related to gravity anomalies. There is currently no such analog for magnetic sensing at the Earth’s surface from space. Consequently, magnetic maps, while widely available, don’t have the same ubiquity as gravity products over water.
Quantum sensor types
For gravimetry, quantum navigation is based on atom interferometry, akin to the devices used in inertial navigation, but here detecting tiny variations in gravitational acceleration and comparing against a map, rather than focusing exclusively on inertial accelerations and rotations in order to calculate a pure-inertial solution. Sensors may be configured as single-axis, vector (three-axis, with all oriented to have a component aligned to gravity), and gradiometric (two gravimeters used to provide differential measurement). Q-CTRL has built all varieties of gravimeters and is currently developing the world’s smallest three-axis quantum gravimeter under the DARPA RoQS program.
In magnetometry, two classes of devices are widely being explored: atomic magnetometers (also known as optically pumped magnetometers) and solid-state devices such as NV diamond. Both meet the sensitivity requirements for magnetic navigation (though OPMs are over a thousand times more sensitive). The similarities end when discussing stability and other secondary metrics such as heading error, dead zones, bandwidth, etc.
OPMs function using a small glass cell filled with an atomic vapor, which can be interrogated using laser light. The atoms behave like miniature compass needles and respond to an ambient field. They are intrinsically scalar and provide outputs that are absolute and largely immune to changes in the ambient environment due to their method of transduction. They also deliver advantages in bandwidth, with records achieving instantaneous bandwidth from mHz to approximately 1 MHz.
For OPMs, the atomic spins are first polarized, and when subjected to an ambient magnetic field rotate like tiny compass needles. An incident laser source interacts with the spin-polarized atomic vapor, and its own polarization changes upon interaction with the atoms. This change in polarization can be detected using standard optical techniques. Source: Q-CTRL
Currently, the devices are macroscopic, but a variety of vendors are now manufacturing miniaturized vapor cells leveraging semiconductor processing techniques. Q-CTRL’s magnetic navigation flight demonstrations are based on in-house OPM technology and macroscopic (5-7mm scale) atomic vapor cells.
NV diamond is a popular alternative magnetometer architecture that leverages atomic-scale defects inside a solid substrate of diamond. Similar to the OPM, the defects behave like tiny compass needles and can be measured using laser beams. They provide potential advantages in integrated manufacturability and also enable native vector measurement (providing both field strength and direction).
Because the atomic-scale defects used in NV diamond are not truly atoms, their method of sensing magnetic fields is also highly sensitive to other things that change the shape of the diamond lattice, like temperature and pressure. NV diamond has an intrinsic coefficient of thermal sensitivity such that keeping thermal drifts small compared to required sensitivity (~10nT) requires stabilization to thousandths of a degree (mK). Similarly, strain sensitivity in the diamond substrate means that atmospheric pressure and altitude changes both shift the sensor output. These are addressable but require a wide variety of classical countermeasures in the form of packaging and feedforward stabilization that introduce their own channels for error and drift.
Our team has directly run navigation programs leveraging NV magnetometers and determined that in real-world settings, the current generation of devices is not fit-for-purpose in navigation, despite great interest in their potential. There remains significant room for ongoing innovation, and there are many other applications outside of navigation where NV’s strengths may find better use.
Real-world demonstrations
Quantum magnetic navigation has shown the widest variety of real-world demonstrations and is the only quantum navigation approach validated to outperform like-for-like classical GPS alternatives. Q-CTRL validated real-time navigational performance through a series of flight tests of its in-house system in 2025. These demonstrated positioning accuracy with an average of ~200-300m error in GPS-free flights up to 800km in length, and achieved RNP=0.3NM (95% confidence interval), the “gold-standard” for commercial navigation in cruise, approach, and landing. Flights were conducted under a wide range of altitudes and vehicle dynamics, with sensors mounted in various locations on the aircraft. The system was also deployed on drones with defense partners and validated over land and over water. In addition, Q-CTRL demonstrated magnetic navigation on a ground vehicle. Each demonstration used only publicly available maps; complementary high-resolution maps are now under development by, for instance, the U.S. Defense Innovation Unit.
A series of other performers, such as Honeywell and Leidos, have also announced field trials of magnetic navigation systems built using commercial-off-the-shelf sensor hardware based on legacy magnetometers, however details are not broadly publicly available.
Quantum gravitational navigation has not yet been publicly demonstrated, but maritime survey with sufficient accuracy to demonstrate navigation has been achieved using systems built by both Q-CTRL and Vector Atomic.
The case for a full quantum navigation solution
All of these modalities require a combination of multiple sensor types. Both magnetic and gravitational position fixing rely on ancillary inputs to correct for vehicle motion and noise, and both also effectively aid an IMU in creating a navigational update.
In the real world, we’ve seen that the best performance is delivered via a comprehensive approach to sensor fusion that combines multiple corrections to an IMU—magnetic, gravitational, airspeed, altitude, initial GPS position, etc. Achieving good signatures for each correction requires careful alignment, use of co-sensors for real-time feedback, and the like.
There’s considerable crossover in these processes. IMU inputs help identify vehicle attitude, which is then used in magnetic denoising, and they’re also used to determine the orientation of the gravimeters. But the IMU itself drifts, leading to imperfections in the compensation process. Gravitational and magnetic navigation inputs are both used to correct drifts in the IMU. Of course, things work because each correction is structured to make the overall drifts smaller without runaway.
The interconnection between the IMU and the geophysical correction inputs suggests that the ultimate pathway forward may be via a full quantum navigation solution (QNS).
The QNS concept delivers benefits both through the performance of its individual components and the positive feedback arising from the fusion of multiple sensors. Both magnetic and gravity navigation can be viewed as highly non-linear measurements. Access to more accurate inertial measurement units, beyond just reducing drift, creates fundamentally more stable map-matching updates, pushing map-matching techniques further into a linear regime. These improved map-matching updates then further constrain the drift of the already-enhanced IMU!
Creating accurate quantum IMUs at low SWaP will enable highly accurate map-matching across the widest suite of navigating platforms—even small unmanned systems, which are experiencing a surge in utility on land and at sea.
In our view, this is the strongest argument for an overall quantum navigation solution. It’s not that quantum gyroscopes or accelerometers are by themselves that much better at inertial measurement. It’s when creating a complete navigational system that the benefits of reducing drifts and adding positioning corrections through different quantum sensors compound.
We’re looking forward to continuing to drive the development of quantum navigation systems along with our peers in the field, and we’re focusing 100% on the delivery of real-world impact on the platforms that matter.
Foundations
Take the next step on your journey with short articles to help you understand how quantum computing and sensing will transform the world